




Aperçu des variantes du LD1000
Le vérin électrique LD1000 est un actionneur haute performance sans entretien de la dernière génération. Il allie force et précision à une construction compacte et à une incroyable capacité d'intégration dans n'importe quelle machine, dispositif ou partie de bâtiment.
Ce vérin électrique fournit une force de poussée allant jusqu'à 10.000 N ou une vitesse de déplacement allant jusqu'à 156 mm/s. Avec une longueur de course au choix de 15 mm à 1.000 mm, la possibilité de personnaliser les suspensions, les raccords, etc. ainsi que les différentes options de commande, il convient à une multitude d'applications.
Le vérin électrique linéaire est conçu pour une robustesse et une longévité maximales. En témoignent le facteur de marche supérieur à la moyenne de 30 % et le boîtier de haute qualité qui, grâce à l'indice de protection IP69k, résiste même à un jet d'eau à haute pression.
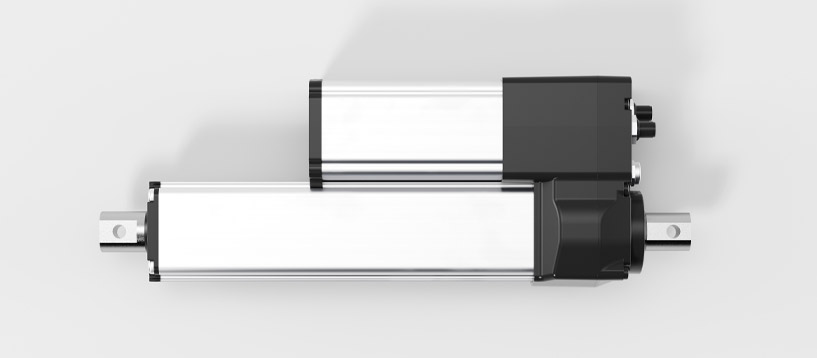
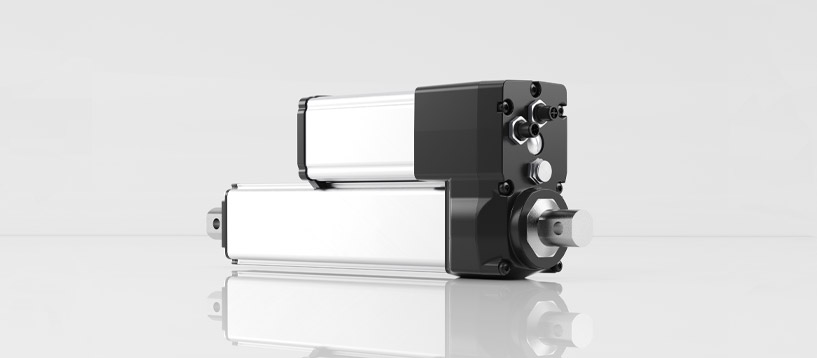
Le modèle LD1000C possède une commande entièrement intégrée dans le boîtier, pouvant être mise à jour, et convient également pour le fonctionnement synchrone.
Le modèle LD1000E, de construction identique, ne comporte pas cette commande intégrée, mais peut également être piloté de plusieurs manières et offre des signaux de fin de course ainsi qu'une limitation de surintensité.
LD1000E et LD1000C comparés
|
LD1000E
Avec interrupteur de fin 
|
LD1000C
Avec contrôleur
|
|
| En savoir plus | En savoir plus | |
| Fonctions de contrôle / régulation | ||
| Interface de communication | ||
| Classe de protection (IP69K) | ||
| Autoblocage jusqu'à la charge nominale | ||
| Des courses spéciales peuvent être définies par le client (avec logiciel) | ||
| Les courses spéciales peuvent être réglées en usine | ||
| Mécanismes d'accrochage personnalisables | ||
| Caractéristiques supplémentaires | ||
| Contrôle de la température | ||
| Arrêt du blocage | ||
| Arrêt de l'alimentation | ||
| Régulation du courant | ||
| Limitation du courant | ||
| Fonctions de surveillance | ||
| Interrogation du signal de position | ||
| Régulation de la vitesse | ||
| Retour de position analogique | ||
| Retour de position finale sans potentiel | ||
| Retour de position finale lié au potentiel | ||
| Détection de la position finale | ||
| Système de mesure de déplacement absolu | ||
| Retour d'information | ||
| Mouvement d'entraînement synchrone | ||
| Le sens du mouvement peut être sélectionné en inversant la polarité de la tension d'alimentation | ||
| Peut être contrôlé numériquement | ||
| Logiciel client | ||
| Rampes de démarrage/arrêt programmables | ||
| Vitesse configurable |
